Hybride Arbeitsprinzipien
In der Baupraxis werden einfache, aber sehr leistungsfähige finite Elemente gefordert. Sie sollen für jeden Elementtyp lediglich die für die Elementform erforderliche Anzahl von Eckknoten besitzen. In diesen sollen als Freiheitsgrade nur Verschiebungen und/oder Verdrehungen auftreten.
Neben den Forderungen hinsichtlich der exakten Darstellungen starrer Bewegungsmöglichkeiten und konstanter Dehnungszustände müssen statische Verträglichkeit im Elementinneren (Erfüllung des Gleichgewichts) und kinematische Verträglichkeit an den Elementrändern (keine Risse und keine Überlappungen zwischen angrenzenden Elementen) gesichert sein.
Es ist nicht möglich, ein finites Elemente auf Grund der Kraft- oder Verschiebungsmethode zu entwerfen, das die genannten Forderungen erfüllt. Einen Ausweg aus dieser misslichen Situation liefert die sogenannte hybride Methode.
In ihr werden Kraft- und Verschiebungsmethode zu einem kombinierten, hybriden Arbeitsprinzip verschmolzen. Nach diesem Arbeitsprinzip werden unsere finiten Elemente als hybride Spannungselemente entwickelt. Sie sind sehr leistungsfähig und erfüllen selbstverständlich obige Forderungen. Die theoretischen Grundlagen werden im Folgenden zusammengestellt.
Neben den Forderungen hinsichtlich der exakten Darstellungen starrer Bewegungsmöglichkeiten und konstanter Dehnungszustände müssen statische Verträglichkeit im Elementinneren (Erfüllung des Gleichgewichts) und kinematische Verträglichkeit an den Elementrändern (keine Risse und keine Überlappungen zwischen angrenzenden Elementen) gesichert sein.
Es ist nicht möglich, ein finites Elemente auf Grund der Kraft- oder Verschiebungsmethode zu entwerfen, das die genannten Forderungen erfüllt. Einen Ausweg aus dieser misslichen Situation liefert die sogenannte hybride Methode.
In ihr werden Kraft- und Verschiebungsmethode zu einem kombinierten, hybriden Arbeitsprinzip verschmolzen. Nach diesem Arbeitsprinzip werden unsere finiten Elemente als hybride Spannungselemente entwickelt. Sie sind sehr leistungsfähig und erfüllen selbstverständlich obige Forderungen. Die theoretischen Grundlagen werden im Folgenden zusammengestellt.
Bei linear elastischem Materialverhalten gelten die auf Scheiben- und Plattenelemente zugeschnittenen Arbeitsprinzipien:
 |  | (11) | |
 |  | (12) |
Hierin bedeuten:
 | Vektor der inneren Schnittkräfte nach (3) bzw. (5) |
 | Vektor der Randschnittkräfte nach (7) bzw. (9) |
 | Vektor der Randverrückung nach (8) und (10) |
 | Vektor der Linienlasten auf den Randkanten |
 | Vektor der Anfangsdehnung infolge Temperaturänderung |
 | inverse Elastizitätsmatrix, G: Gleitmodul |
 | Kirchhoffsche Plattenelemente |
 | Mindlin-Reissnersche Plattenelemente |
d: Elementdicke, A: Fläche, s: Randweg,  :Randweg mit Lasten :Randweg mit Lasten |
Die hybriden Arbeitsprinzipien (11) und (12) enthalten neben den Schnittkräften im Element nur die Verrückungen am Elementrand. Die Randverrückungen  bzw.
bzw. sowie die inneren Schnittkräfte n bei Scheiben bzw. m und q bei Platten müssen über Ansatzfunktionen dem entsprechenden Problem angepasst werden. Sowohl die inneren Schnittkräfte als auch die Verrückungen auf den Randkanten müssen festen Voraussetzungen genügen. Ein Ansatz für die inneren Schnittkräfte muss die Gleichgewichtsbedingungen (4) bzw. (6) erfüllen, und ein Verrückungsansatz entlang der Randkanten muss die Stetigkeitsbedingungen zwischen angrenzenden Elementen gewährleisten.
sowie die inneren Schnittkräfte n bei Scheiben bzw. m und q bei Platten müssen über Ansatzfunktionen dem entsprechenden Problem angepasst werden. Sowohl die inneren Schnittkräfte als auch die Verrückungen auf den Randkanten müssen festen Voraussetzungen genügen. Ein Ansatz für die inneren Schnittkräfte muss die Gleichgewichtsbedingungen (4) bzw. (6) erfüllen, und ein Verrückungsansatz entlang der Randkanten muss die Stetigkeitsbedingungen zwischen angrenzenden Elementen gewährleisten.
bzw. sowie die inneren Schnittkräfte n bei Scheiben bzw. m und q bei Platten müssen über Ansatzfunktionen dem entsprechenden Problem angepasst werden. Sowohl die inneren Schnittkräfte als auch die Verrückungen auf den Randkanten müssen festen Voraussetzungen genügen. Ein Ansatz für die inneren Schnittkräfte muss die Gleichgewichtsbedingungen (4) bzw. (6) erfüllen, und ein Verrückungsansatz entlang der Randkanten muss die Stetigkeitsbedingungen zwischen angrenzenden Elementen gewährleisten.Für die inneren Schnittkräfte wird der Ansatz
 |  | (13) |
gewählt. Die Vektoren  bzw.
bzw.  und
und  sind partikuläre Lösungen der inhomogenen Gleichgewichtsbedingungen in (4) bzw. (6) und beachten die aufgebrachten Flächenlasten
sind partikuläre Lösungen der inhomogenen Gleichgewichtsbedingungen in (4) bzw. (6) und beachten die aufgebrachten Flächenlasten  bzw.
bzw.  und
und  . Die Felder
. Die Felder  und
und  enthalten vollständige Polynome in den x-, y-Koordinaten mit den Freiwerten (Koeffizienten)
enthalten vollständige Polynome in den x-, y-Koordinaten mit den Freiwerten (Koeffizienten)  bzw.
bzw.  Die Terme
Die Terme  bzw.
bzw.  müssen die homogenen Gleichgewichtsbedingungen in (4) bzw. (6) erfüllen. Das in (13) genannte Feld
müssen die homogenen Gleichgewichtsbedingungen in (4) bzw. (6) erfüllen. Das in (13) genannte Feld  wird aus dem Feld M nach (5b) abgeleitet. Aus den inneren Schnittkräften lassen sich unter Beachtung der Orientierungen der Randkanten (Bild 5 bzw. 6) die Randschnittkräfte
wird aus dem Feld M nach (5b) abgeleitet. Aus den inneren Schnittkräften lassen sich unter Beachtung der Orientierungen der Randkanten (Bild 5 bzw. 6) die Randschnittkräfte  bzw.
bzw.  berechnen. Diese können auf die Form
berechnen. Diese können auf die Form
bzw. und sind partikuläre Lösungen der inhomogenen Gleichgewichtsbedingungen in (4) bzw. (6) und beachten die aufgebrachten Flächenlasten bzw. und . Die Felder und enthalten vollständige Polynome in den x-, y-Koordinaten mit den Freiwerten (Koeffizienten) bzw. Die Terme bzw. müssen die homogenen Gleichgewichtsbedingungen in (4) bzw. (6) erfüllen. Das in (13) genannte Feld wird aus dem Feld M nach (5b) abgeleitet. Aus den inneren Schnittkräften lassen sich unter Beachtung der Orientierungen der Randkanten (Bild 5 bzw. 6) die Randschnittkräfte bzw. berechnen. Diese können auf die Form |  | (14) |
gebracht werden. Die auf den Randkanten vorliegenden, unterschiedlichen Verformungszustände werden durch Polynome ersten, zweiten und dritten Grades in der Randkoordinate s beschrieben. Die auftretenden Freiwerte werden mit Hilfe von Transformations- und Inzidenzmatrizen mit den globalen Knotenverrückungen in (1) bzw. (2) gekoppelt. Die Verläufe der lokalen Randverrückungen lassen sich in der Kurzform darstellen:
 |  | (15) | |
| darstellen. | |||
| Man definiert als Flexibilitätsmatrix | |||
 |  | ||
| als Koppelmatrix | |||
 |  | ||
| und als Belastungsvektoren | |||
 |  | ||
| und erhält damit aus (11) bzw. (12) die komprimierte Aussage: | |||
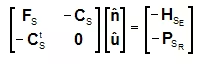 |  | ||
| Aus diesen Gleichungen folgt | |||
 |  | ||
| sowie | |||
 |  | ||
| Mit der Elementsteifigkeitsmatrix | |||
 |  | ||
| und dem Vektor aus Linien-, Flächen- und Temperaturbelastungen | |||
 |  | ||
| kommt man zum Kraft-Verschiebungsgesetz | |||
 |  | ||
| auf Elementebene. | |||
Bei den Ansätzen der Polynome für die Verrückungen und die Schnittkräfte ist einige Sorgfalt angebracht. Die im Gleichgewicht stehenden Randkräfte leisten bei  starren Bewegungsmöglichkeiten keine Arbeit. Deshalb muss der Rangabfall in der Elementsteifigkeitsmatrix starren Bewegungsmöglichkeiten keine Arbeit. Deshalb muss der Rangabfall in der Elementsteifigkeitsmatrix  bzw. bzw.  genau betragen. In den Ansätzen für die Schnittkräfte und die Verrückungen mit genau betragen. In den Ansätzen für die Schnittkräfte und die Verrückungen mit  bzw. bzw.  Freiheitsgraden muss die notwendige Bedingung Freiheitsgraden muss die notwendige Bedingung | |||
 | |||
| sichergestellt sein, damit kein weiterer Rangabfall in der Elementsteifigkeitsmatrix auftritt. Sowohl die Scheiben- als auch die Plattenelemente besitzen | |||
 | |||
| starre Bewegungsmöglichkeiten (Scheibe gemäß Bild 1: zwei Translationen in x- und y-Richtung und eine Rotation um die z-Achse; Platte gemäß Bild 2: zwei Rotationen um x- und y-Achse und eine Translation in z-Richtung). Da die für 4-Knotenelemente gültigen Ansatzfunktionen auch bei 3-Knotenelementen erlaubt sind (Eine Umkehrung dieses Satzes ist nicht zulässig.), werden in den weiteren Erläuterungen lediglich 4-Knotenelemente behandelt. Da diese | |||
 | |||
| Freiheitsgrade hinsichtlich ihrer Verrückungen haben, muss für die Anzahl der Freiheitsgrade in den gewählten Ansätzen für die inneren Schnittkräfte | |||
 | |||
| gelten. Diese Forderung wird mit einem quadratischen Polynomansatz erfüllt. | |||
 | Für die homogenen Anteile von  , und , und  werden jeweils vollständige quadratische Polynome nach Bild 7 angesetzt. Jeder Funktionswert wird mit einem Freiwert multipliziert. Somit enthalten diese Ansätze zunächst jeweils 18 Freiheitsgrade. Die Erfüllung der homogenen Gleichgewichtsbedingungen (4) bzw. (6) führt zu sechs linearen Abhängigkeiten bei der Scheibe und zu einer linearen Abhängigkeit bei der Platte. Daher besitzen Scheiben- bzw. Plattenelemente die folgende Anzahl an Freiheitsgraden in den Schnittkräften: werden jeweils vollständige quadratische Polynome nach Bild 7 angesetzt. Jeder Funktionswert wird mit einem Freiwert multipliziert. Somit enthalten diese Ansätze zunächst jeweils 18 Freiheitsgrade. Die Erfüllung der homogenen Gleichgewichtsbedingungen (4) bzw. (6) führt zu sechs linearen Abhängigkeiten bei der Scheibe und zu einer linearen Abhängigkeit bei der Platte. Daher besitzen Scheiben- bzw. Plattenelemente die folgende Anzahl an Freiheitsgraden in den Schnittkräften: | ||
| Bild 7: Schema der Polynomterme eines vollständigen quadratischen Polynoms | |||
 |  | ||
Die auf diese Weise gewonnen Ansatzfunktionen werden in die Felder bzw. in (13) eingeordnet. Die zugehörigen Freiwerte werden in den Vektoren (mit 12 Komponenten) bzw. (mit 17 Komponenten) zusammengefasst.
bzw. in (13) eingeordnet. Die zugehörigen Freiwerte werden in den Vektoren (mit 12 Komponenten) bzw. (mit 17 Komponenten) zusammengefasst.(Anmerkung: Bei Scheiben- und Plattenelementen mit drei Eckknoten reicht ein linearer Polynomansatz aus. Bei Plattenelementen mit vier Eckknoten genügt ein bilinearer Ansatz.)
Beim Scheibenelement (Bild 5) werden die Verschiebungen  entlang einer Randkante mit einem linearen Ansatz mit zwei Freiwerten und die Verschiebungen
entlang einer Randkante mit einem linearen Ansatz mit zwei Freiwerten und die Verschiebungen  senkrecht zur Randkante mit einem kubischen Polynom mit vier Freiwerten formuliert. Die sechs auftretenden Freiwerte sind die sechs lokalen Verrückungsfreiheitsgrade des Anfang- und Endknotens der Kante.
senkrecht zur Randkante mit einem kubischen Polynom mit vier Freiwerten formuliert. Die sechs auftretenden Freiwerte sind die sechs lokalen Verrückungsfreiheitsgrade des Anfang- und Endknotens der Kante.
entlang einer Randkante mit einem linearen Ansatz mit zwei Freiwerten und die Verschiebungen senkrecht zur Randkante mit einem kubischen Polynom mit vier Freiwerten formuliert. Die sechs auftretenden Freiwerte sind die sechs lokalen Verrückungsfreiheitsgrade des Anfang- und Endknotens der Kante.Am Rand i-j werden sie mit  bezeichnet. Da es sich um lokale Größen handelt, werden sie zunächst in globale Knotenverrückungen des x-,y-,z-Koordinatensystems gedreht. Diese werden anschließend über Inzidenzvorschriften mit dem globalen Vektor der Knotenverrückungen (1) gekoppelt. In gleicher Weise wird auf den weiteren Randkanten vorgegangen. Nach diesen Beschreibungen findet man das Feld
bezeichnet. Da es sich um lokale Größen handelt, werden sie zunächst in globale Knotenverrückungen des x-,y-,z-Koordinatensystems gedreht. Diese werden anschließend über Inzidenzvorschriften mit dem globalen Vektor der Knotenverrückungen (1) gekoppelt. In gleicher Weise wird auf den weiteren Randkanten vorgegangen. Nach diesen Beschreibungen findet man das Feld  , das die lokalen Verläufe der Randverrückungen mit dem globalen Vektor der Knotenverrückungen (1) verknüpft:
, das die lokalen Verläufe der Randverrückungen mit dem globalen Vektor der Knotenverrückungen (1) verknüpft:  (15).
(15).
bezeichnet. Da es sich um lokale Größen handelt, werden sie zunächst in globale Knotenverrückungen des x-,y-,z-Koordinatensystems gedreht. Diese werden anschließend über Inzidenzvorschriften mit dem globalen Vektor der Knotenverrückungen (1) gekoppelt. In gleicher Weise wird auf den weiteren Randkanten vorgegangen. Nach diesen Beschreibungen findet man das Feld , das die lokalen Verläufe der Randverrückungen mit dem globalen Vektor der Knotenverrückungen (1) verknüpft: (15).In ähnlicher Weise wird beim Plattenelement vorgegangen. Bevor auf geeignete Ansätze für die Verrückungen auf den Randkanten eingegangen werden kann, sei daran erinnert, dass Plattenelemente Querschübe übertragen. Diese zeigen nach der Kirchhoffschen Plattentheorie keinerlei Verformungen. Die Platte verhält sich querschubstarr. Ein Scherwinkel kann sich nicht einstellen. Deshalb muss auf jeder Randkante (z.B. Randkante i-j in Bild 6) gelten:
 | (*) |
Diese Bedingung verknüpft die Durchbiegung w mit der Verdrehung ψ, gemäß  . In der Mindlin-Reissnerschen Plattentheorie wird berücksichtigt, dass sich infolge Querschubübertragungen korrespondierende Verformungen einstellen. Der Scherwinkel auf den Randkanten verschwindet nicht, er muss die Bedingung
. In der Mindlin-Reissnerschen Plattentheorie wird berücksichtigt, dass sich infolge Querschubübertragungen korrespondierende Verformungen einstellen. Der Scherwinkel auf den Randkanten verschwindet nicht, er muss die Bedingung
. In der Mindlin-Reissnerschen Plattentheorie wird berücksichtigt, dass sich infolge Querschubübertragungen korrespondierende Verformungen einstellen. Der Scherwinkel auf den Randkanten verschwindet nicht, er muss die Bedingung |
erfüllen. Es ist nicht leicht, Ansätze für w und ψ zu finden, die der angegebenen Bedingung genügen. Im Sinne der FE-Methode, dass diese mit immer feinerer Elementierung zu immer besseren Ergebnissen strebt, reicht es aus, für den Scherwinkel einen konstanten Verlauf über eine Randkante anzunehmen. Für die Verläufe der Durchbiegung w und der Verdrehung ψ stehen auf jeder Randkante i-j der Länge  die vier Knotenverrückungen
die vier Knotenverrückungen  und
und  als Stützwerte zur Verfügung, mit denen obige Bedingung diskretisiert wird:
als Stützwerte zur Verfügung, mit denen obige Bedingung diskretisiert wird:
die vier Knotenverrückungen und als Stützwerte zur Verfügung, mit denen obige Bedingung diskretisiert wird: | (**) |
Die Ansatzfunktionen für die Verrückungen w und ψ müssen zulässig sein, d.h. die müssen die Bedingungen (*) und (**) befriedigen.
Nach Bild 6 werden die auf einer Randkante i-j gewählten Verrückungen erklärt. Die Koordinate s wird auf die Kantenlänge bezogen und durch  ersetzt. Der Verlauf der Verdrehung φ wird ausgedrückt in dem linearen Ansatz:
ersetzt. Der Verlauf der Verdrehung φ wird ausgedrückt in dem linearen Ansatz:
bezogen und durch ersetzt. Der Verlauf der Verdrehung φ wird ausgedrückt in dem linearen Ansatz: |
Folgende Ansätze für die Verläufe der Verdrehung ψ und der Durchbiegung w werden gewählt bei der Plattentheorie nach Kirchhoff
 |
und bei der Plattentheorie nach Mindlin-Reissner
 |
Es lässt sich leicht nachvollziehen, dass die Forderungen in (*) und (**) berücksichtigt sind.
Die am jeweiligen Rand benutzten Knotenverrückungen  sind lokal zu verstehen und müssen gedreht und in den globalen Verrückungsvektor einsortiert werden. Dieses Vorgehen führt schließlich zum Feld
sind lokal zu verstehen und müssen gedreht und in den globalen Verrückungsvektor einsortiert werden. Dieses Vorgehen führt schließlich zum Feld  das die besagten lokalen Verläufe der Randverrückungen mit dem globalen Vektor der Knotenverrückungen (2) verbindet:
das die besagten lokalen Verläufe der Randverrückungen mit dem globalen Vektor der Knotenverrückungen (2) verbindet:
sind lokal zu verstehen und müssen gedreht und in den globalen Verrückungsvektor einsortiert werden. Dieses Vorgehen führt schließlich zum Feld das die besagten lokalen Verläufe der Randverrückungen mit dem globalen Vektor der Knotenverrückungen (2) verbindet: |
Nach diesem hier aufgezeigten FEM-Konzept wurden unsere leistungsfähigen hybriden Spannungselemente für die Baupraxis entwickelt.